5 DOF Robotic Arm: Inverse Kinematics And Trajectory Planning RatedStar Attraction X 4:49 4 years ago 5 161 Скачать Далее
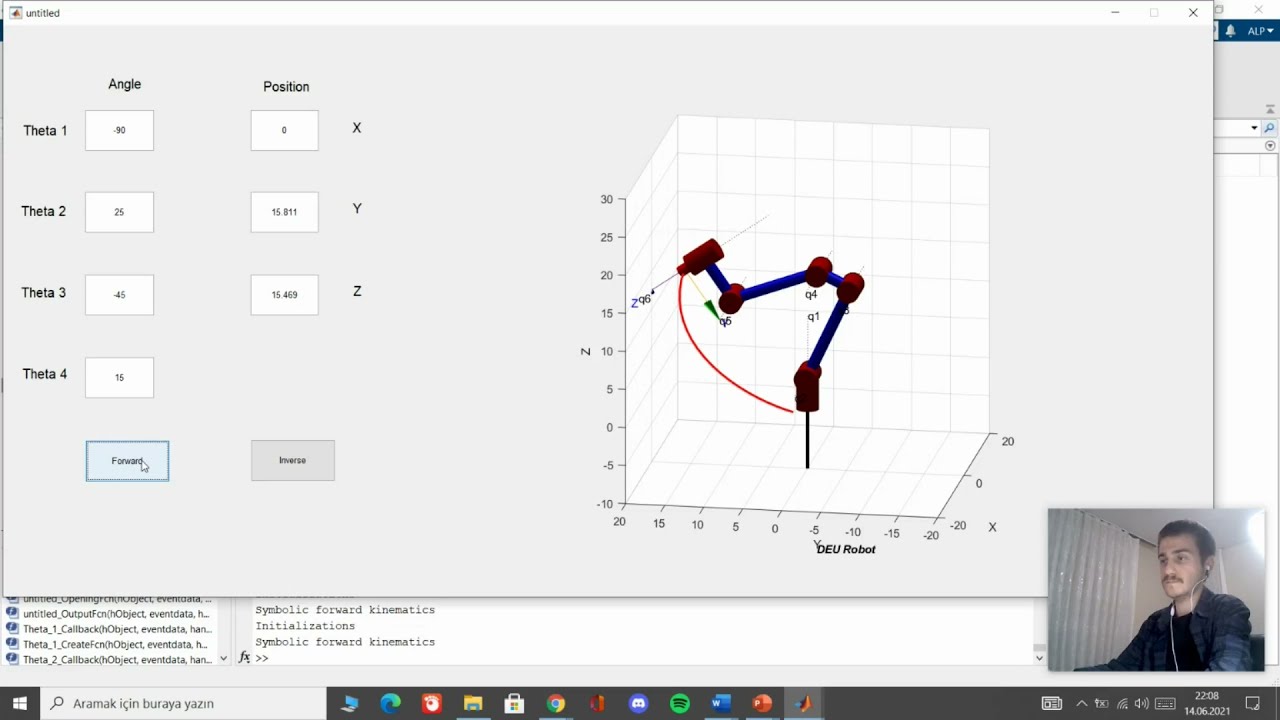
Creating simulation environment for 4DOF robotic arm [Peter Corke Robotics Toolbox] [Matlab GUI] Alp Kızılöz 22:38 3 years ago 37 820 Скачать Далее
6 DOF Robotic Arm Inverse Kinematics And Motion Planning | Inspired By Boston Dynamics SpotArm RatedStar Attraction X 4:49 3 years ago 2 262 Скачать Далее
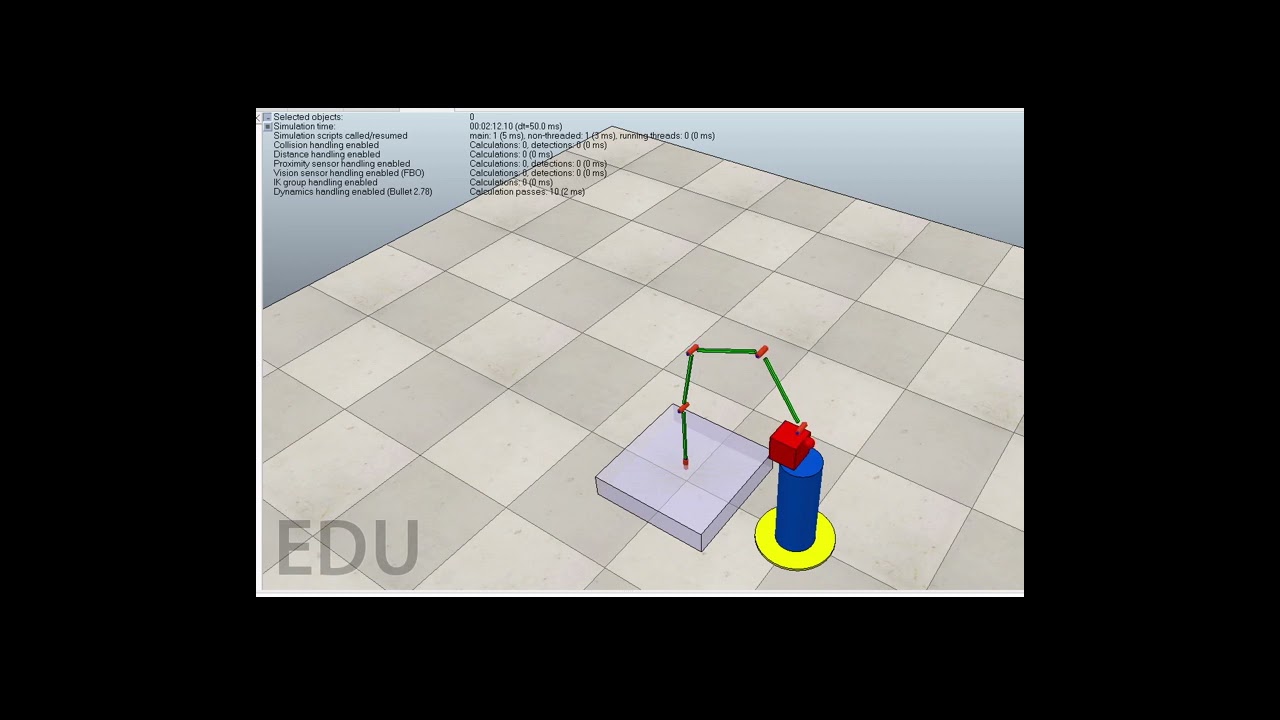
Drive Robot Using Inverse Kinematics in Simulink | MATLAB 2021 | Robotic System Toolbox Learning Orbis 15:23 2 years ago 55 773 Скачать Далее
Inverse Kinematics of Robots | Robotics 101 Engineering Simplified 9:41 2 years ago 50 231 Скачать Далее
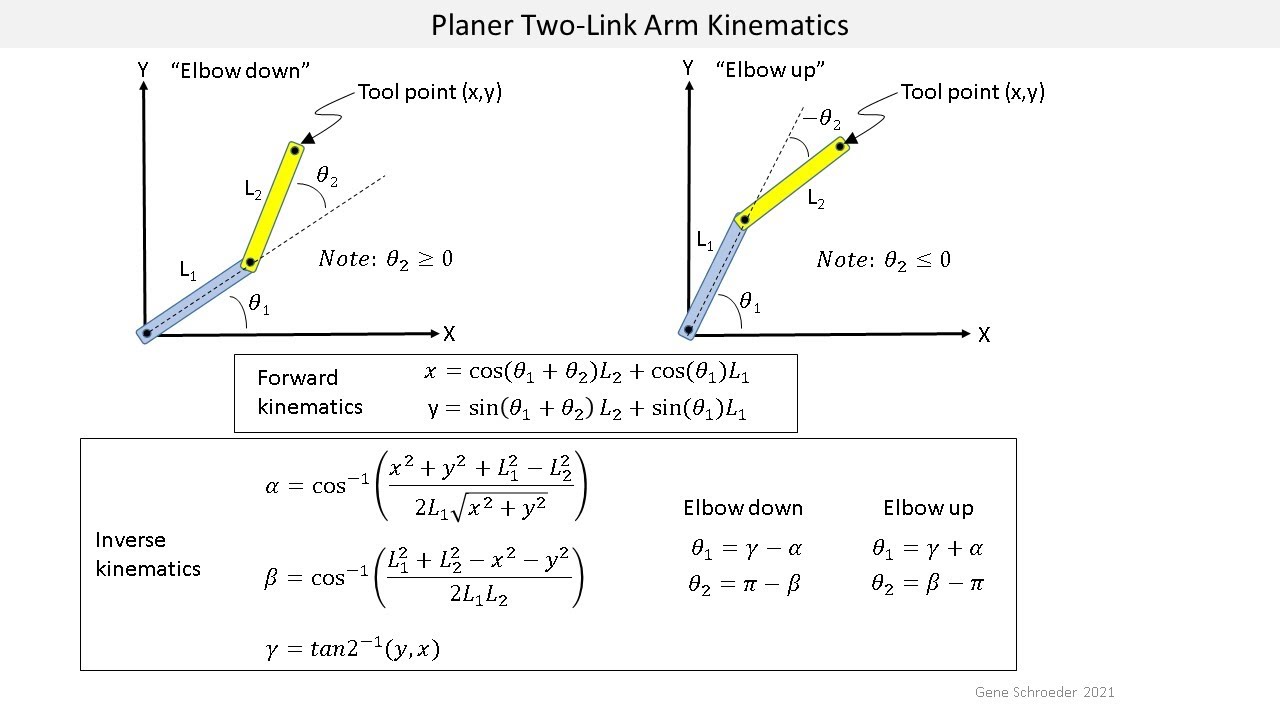
Steppers and Robot Kinematics Lesson 4. Robot Kinematics and Trajectory Planning Gene Schroeder Tech 20:44 2 years ago 1 646 Скачать Далее
Steppers and Robot Kinematics Lesson 5. Draw Module Design Gene Schroeder Tech 25:31 2 years ago 641 Скачать Далее
5 Axis Robot Arm Stirs Using Inverse Kinematics & Trajectory Planning | #Shorts #ytshorts | RatedStar Attraction X 0:25 3 years ago 705 Скачать Далее
Arduino Robotic Arm: Trajectory Planning and Inverse Kinematics RatedStar Attraction X 6:07 4 years ago 3 871 Скачать Далее
Inverse Kinematics and Trajectory Execution of a robot manipulator using ROS Moveit and Arduino. Robotics and ROS Learning 17:01 5 years ago 30 831 Скачать Далее